なぜオスプレイは危険だといわれるのか (4)
前回は、戦闘機とか攻撃機と呼ばれる機種の視点から、垂直離着陸の試みを見た。このような試みがなされた理由ははっきりしていて、空母に積まれることで圧倒的な機動性を示した戦闘機・攻撃機を、空母のような特殊な船舶以外でも、そしてもっと一般的に滑走路のない場所でも展開できるようにしたい、という要望があるからだ。
輸送機の場合は、航空機の高速輸送を、滑走路が確保し難い地点に対しても行いたい……こういう要望が当初からあった。だから、特に軍用輸送機の場合、できるだけ短距離で離着陸できる機体が求められる。このような機体を STOL (Short Take Off and Landing aircraft) という。これに対して、先から出ている垂直離着陸機の方は VTOL (Vertical Take Off and Landing aircraft) と呼ばれている。
固定翼機の STOL 性を向上させるためには、フラップ(離着陸時に翼の前後に張り出し、見かけの翼の大きさを大きくする)を大型化し、エンジンの排気が翼の上面を沿って斜め下に流れるようにエンジンを翼の上部に設置する。このような機体は数多く開発され、実際に運用されてもいるわけだが、STOL 性を向上させるのにも限度がある。前回のように推力の方向を変えて、浮かび上がる助けにすることができれば、その限界を超えた STOL 性、更には VTOL 性を付与することができるかもしれない。
このような発想で作られたのが、X-18 という試験機である:

この X-18 は、推力を下に向けるために、エンジンごと翼を傾けられるようになっている。

しかし、この X-18 の試験はうまくいかなかった。翼を斜めにした状態で短距離離陸を行うことには成功しているのだが、この機体の場合も遷移状態が不安定で、垂直離着陸やホバリングを行うことができなかった。
X-18 が、当初期待されていた垂直機動ができなかったのには、いくつかの理由がある。まず、最大の理由は、左右のエンジンの同調が行われていなかったためである。
プロペラエンジンのように、大きな物体を回転させる機関が動くと、プロペラの回転方向とは逆に、エンジンの駆動軸をねじる力(カウンタートルク)がはたらく。シングルローター型のヘリコプターで、尾部にテイルローターという小さなローターが付いているのを皆さんご存知と思うのだが、あれはメインローターを回すエンジンが発生するカウンタートルクを打ち消すためのものである。
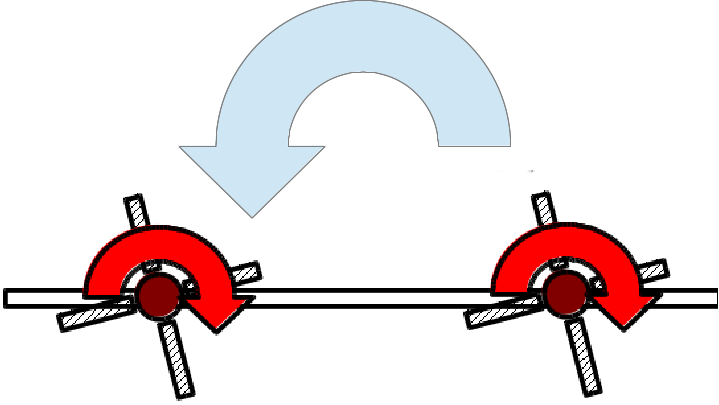
もし、双発機のプロペラが同じ回転方向だとすると、上図に示すようなカウンタートルクが機体全体を回転させようとする。普通に飛行しているときには、このカウンタートルクが発生していても、主翼や水平尾翼を空気に逆らって「回す」ことができないのであまり問題はないのだが、安定性を要求される場合は、以下の図のように、左右のエンジンの回転方向を逆にする。
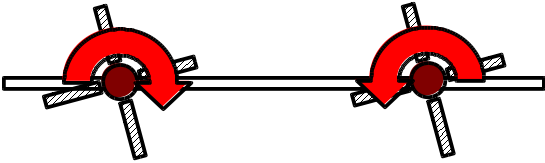
こうすることで、左右のエンジンが発生するカウンタートルクを打ち消しあうことができる。
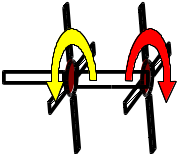
単発のプロペラの場合でも、このようなカウンタートルクが問題になることがある。そういうときは、以下の図に示すように、ふたつのプロペラを同じ回転軸上で逆方向に回転させることがある。これによって、プロペラを駆動することによるカウンタートルクは打ち消される。このようなプロペラのことを2重反転プロペラという。
先の X-18 の写真をもう一度見返してみていただきたいのだが、X-18 はこの2重反転プロペラを装備している。だから、左右のエンジンのカウンタートルクは考えなくてもいいはずだ……と、設計者は考えていたのだろう。しかし、それは甘かった。
ちょっと難しい話になってしまうのだが、2重反転プロペラは、プロペラの回転に起因するカウンタートルクを相殺することができる。しかし、エンジンのドライブシャフト等の発生するカウンタートルクまでを相殺することはできない。更に、左右のエンジンの回転数にわずかでもずれがあった場合、それはカウンタートルクの大きさの違いを生む。X-18 でエンジンを上に向けているときには、機体が水平飛行しているときと違って、機体を安定して支える力は機体のどこにも作用していない。だから、X-18 は機体の挙動が不安定となり、垂直離着陸もホバリングも行うことができなかったのである。
最初に出てきた CH-46 や CH-47 のようなタンデムローター型のヘリコプターも、二つのローターを回転させて動作するわけだが、ではこのタンデムローター型ヘリコプターの場合はどのような仕組みになっているのだろうか。
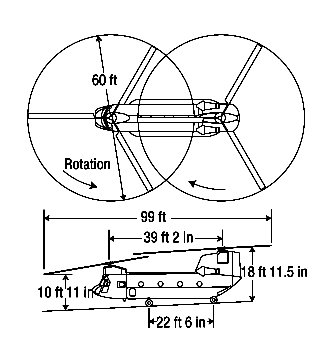
これは、ボーイング社が公開している CH-47 の外観図である。この図にも示されているとおり、タンデムローター型ヘリコプターの前後のローターは逆の方向に回るようになっている。これによってカウンタートルクを打ち消すようになっているのだが、ここでは、前後のローターが上から見ると重なり合っているところに注目していただきたい。この状態で前後のローターが独立して回ると、ローターのブレード同士が接触するような事故を起こしかねないわけだが、タンデムローター型ヘリコプターの場合、前後のローターはシャフトと呼ばれる回転軸を経由して機械的に連結されている。つまり、前のローターが反時計回りに1回転すると、後ろのローターは時計回りに正確に1回転する。機械的に連結されているので、この関係は絶対に崩れない。そして、ローターのブレードは接触せず、前後のローターのカウンタートルクは常に完全に相殺されるのである。
では、先の X-18 もこのシャフトによる連結を行えば成功したのではないか、という話になるわけだが、実はちゃんとそういう試みにつながっていた。

これは XC-142 という試験機である。この機体は、4発のエンジンを全てシャフトで結合している。それに加えて尾翼後方に小さなテールローターまで付けられており、そのおかげで垂直離着陸、ホバリング、水平飛行への移行等を全て問題なく行うことができた。しかし、主翼と胴体の接合部分の設計が難しく、機械的にも複雑であったために、実用に供されることはなかった。
X-18 や XC-142 は、翼を傾けるのでティルト・ウイングと呼ばれる形式であったが、推力の向きを変えるために、何も翼ごとエンジンを傾ける必要はないはずである……要するに、ローターだけ、もしくはローターとエンジンだけ、傾けることができれば良いはずである。さあ、これで、ようやくティルト・ローター機の話の入口まで来ることができたようだ。次回に、いよいよティルト・ローター機に関する話に入ろうと思う。



