なぜオスプレイは危険だといわれるのか (7)
フライバイワイヤ (fly-by-wire, FBW) とは何か。このワイヤというのは電線のことだ、と言うとお分かりいただきやすいだろう。
ライト兄弟が初めて飛行機の製作に成功した頃、飛行機の操縦はワイヤー(こちらの方は細い鉄線を編んだワイヤーの方)で行われた。翼の端や尾翼にワイヤーを張って引っ張り、たわませることで操縦を行っていたわけだ。その後、第二次世界大戦が終わる頃まで、航空機の操縦は基本的にはこのような「人力で制御部を駆動する」ことで行われた。
戦後、航空機が大型になるに連れ、人力だけでは航空機の操縦を行うことが困難になってきた。そのために導入されたのが、油圧による補助機構である。まあ、クルマでいうパワステと同じものだと思っていただければよろしい。このような油圧を用いたシステムでは、圧力のかかる部位のどこかに損傷が生じ、そこから油が抜けてしまうと、操作ができなくなってしまう。そこで、操縦システムの多重化というものが行われるようになってきた。同じような油圧系統を複数設置して、ある系統がダメになったらバックアップの系統に切り替えられるようにするわけだ。このような多重化による信頼性確保をフェイルセーフ fail-safe という。
このような操縦システムは、たとえば人と方向舵の間を:
人力 → 油圧 → 方向舵のように結んでいるわけだ。このように、人と操作するものの間に一枚噛んでもいい、という話になると、
人力 → 電気・電子デバイス → 方向舵という操作でもいいのではないか、という話が出てくる。いや電気は電源落ちたらダメになっちゃうから……ということで、信頼を重んずるエンジニアは抵抗を感じていたと思うけれど、油圧でも途中が駄目になったらダメなのは一緒である。フェイルセーフを磐石にする、という前提で、このような電気的・電子的操作システムが出てきたのは、むしろ自然なことだといえるだろう。
では、これを称してフライバイワイヤと称しているのか……というと、実は伝送経路の電子化だけをこう称しているのではない。ここでは例として、クルマのことを思い返していただきたいのである。
クルマというのは、基本的には機械的な伝達機能で操作するものだった。ステアリングはステアリングシャフトからギヤリンクを介して操舵機構に接続され、スロットルはエンジンとワイヤーやリンケージロッドで結合され、クラッチはクラッチプレートと機械的リンクで結合され、ブレーキはブレーキフルードという名の油の圧力を介して、踏力を補助するかたちで動作する。これが古典的なクルマのシステムだった。
しかし、現在皆さんの身近にあるクルマの多くは、スロットルやブレーキ、クラッチの電子化が行われているものが大半だろう。そして、それらは単に人と機械を結ぶだけでなく、操作する人と操作される対象との間に電子システムが介入しているのだ。たとえば ABS はブレーキ操作に介入しているし、 TCS はスロットル操作に介入している。パワステも速度に応じて切れや重さを変えるように、間に電子的操作機構が介入しているのである。
このような電子的介入によって、クルマの各部は、人間自身では不可能な程の短い時間範囲でのコントロールがなされている。たとえば ABS は、極めて短い時間間隔でポンピングを行うことで、ロックさせずにブレーキングすることを実現している。TCS は、スロットル開度やエンジンの点火機構に、これも極めて短い時間間隔で介入することで、横滑りを防いでいるのである。
このような制御は、1970年代に航空機の分野で実験が始まったものである。そして、短い時間間隔での操縦系への介入・補正が可能になってくると、ここに更にもう一歩進んだ考え方が出てきた。
たとえば、戦闘機の場合を考えてみよう。戦闘機に求められるのは俊敏な運動性能である。操舵に対して敏感に反応するためには、安定板(尾翼)の大きさを小さくする必要がある。しかし、安定板を小さくすると、飛行機の挙動は不安定となり、常に舵の細かい修正をし続けなくてはならない。この問題は、二律背反の問題として、設計者の頭を悩ませていた。
しかし、電子化された操舵システムは、常人では不可能な短い時間感覚で、自動的に舵の細かい修正を行うことが可能なはずだ。空力的には不安定な機体でも、それを電子制御で安定化することができれば、通常は安定に、そして戦闘時は俊敏に動く航空機を作れるのではないか。むしろ、俊敏な戦闘機は空力的な安定性を下げることによって作られるのではないか。そういう考え方が出てきたのである。
先のクルマの例にあてはめるなら、これはスポーツカーを所有することに似ている。スポーツカーの多くは、コーナリング性能を高めるためにホイールベースを短くしているわけだが、これはクルマの安定性を低下させている。だから、濡れたり凍ったりしている路面に出喰わすと、どうにも制御できなくなることがあり得るわけだけど、最近のスポーツカーの多くは ABS と TCS を装備しているから、遊びでドリフトさせることも難しい位安定していて、それでいてコーナリング性能は非常に高いのである。
このような考え方を「静安定性緩和 (relaxed static stability, RSS)」という。この考え方を初めて導入したのが、ジェネラルダイナミックス(現 ロッキード・マーティン)の YF-16 である。YF-16 は、高い性能を実現するために、この静安定性緩和の考えにのっとって、水平尾翼の面積を、空力的に安定とされる面積よりも小さくし、操縦系統を完全に電子化し、安定性を電子制御によって得るように製作された。その結果、空戦性能においては、当時世界最高とされた F-15 のそれを上回り、同時に、十分な兵器搭載量も確保できた。
しかし、YF-16 は、同時にこの電子制御が行き届かなかった場合の恐ろしさをも知らしめることになった。これは YF-16 の初飛行を記録した映像である。実はこのとき、YF-16 はタクシーテストと呼ばれる滑走試験を行っている段階で、飛ぶ予定はなかった。しかし、水平尾翼の制御がばたついて不安定となり、テストパイロットが飛び上がった方が安全と判断し、この初飛行に至った、といわれている。
最新の F-22 ラプターで、フライバイワイヤを統括するコンピュータのトラブルで生じた事故の映像を下に示す。このように、本質的な安定性が低いものを「力業」で安定させるという手法に、緊急時の問題がつきまとうものであることは、否定できない事実である。
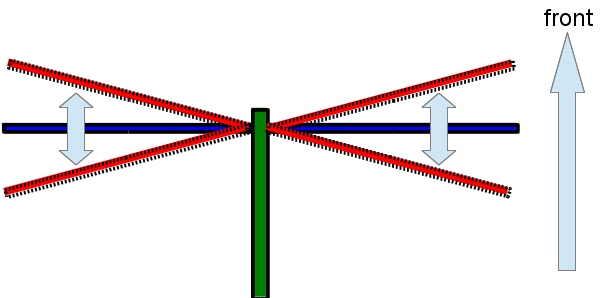
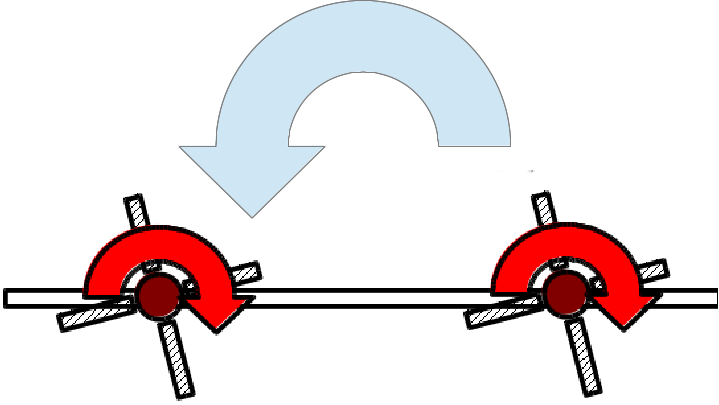
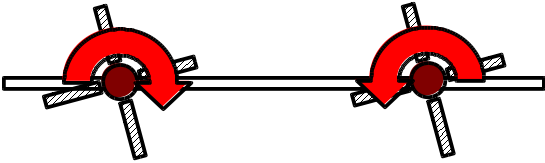
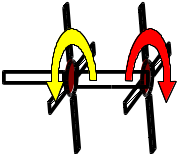
XV-15 も、操縦系統をほぼ完全に電子化したシステムが導入されていた。先にも書いたけれど、タンデムローター型のヘリコプターでは常時結合されているふたつのエンジンは、通常は機械的には結合されていない。これは、通常時はフライバイワイヤによって安定化制御が行われている、ということである。
XV-15 には、フライバイワイヤシステムの不備などの場合に備えて、"zero-zero" 型の射出座席(高度ゼロ、速度ゼロでも安全に脱出可能な射出式の脱出装置)が装備された。試験機だから、いざとなればこれで脱出すればよろしい、というわけだ。幸いなことに、XV-15 の飛行限界を見定めるテスト (flight envelope expansion) は極めて順調に進んで、これを使用しなければならない事態に至ることはなかった。
しかし、実用に供される航空機は、しばしば試験機でも遭遇しないような極端な事態に至ることがある。整えられた環境で、人が想像し得る範囲内で行われる過酷なテストだけでは、そのような事態を未然に防ぐことは、なかなかに難しい場合が多いのである。