XV-15 の開発では、ティルト・ローター機を従来の航空機と差別化し得る部分に最も力が注がれた。特に力が注がれたのは、
- 遷移状態における流体力学的安定性の確保
- 水平飛行における抵抗・振動の軽減
- 操縦系統のフライバイワイヤ化
- フライトシミュレータによるシミュレーションと実機による実験の並行化
である。
水平飛行から垂直機動に切り替わる遷移状態では、ローターやエンジンナセル(エンジンが収納されている場所)が斜め、あるいは上方を向くことによる気流の乱れが生じる。これに関してはエンジン部の模型や実機での風洞試験が多数行われた。
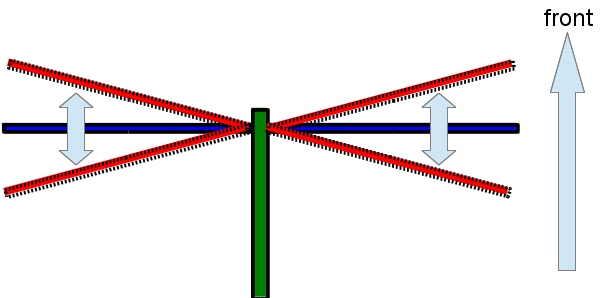
水平飛行における抵抗・振動というのは、ちょっと悩ましい問題である。ヘリコプターとして垂直機動を行うのにローターを最適化すると、水平飛行時にプロペラとして用いるのには大き過ぎ、プロペラの羽根の迎え角(ピッチ)も大き過ぎ、抵抗を生む。この抗力でローターや機体が力を受けると、水平飛行を不安定にする振動の原因となるのである。そのため、ローターの形状は、従来型のプロペラ機同様、先の方に行くに従い細く、またピッチが浅くなるように(捻り下げ)デザインされた。このような形状は、ヘリコプターのローターとしては適切さを欠くのだけど、水平飛行における機動力の方が優先されたのである。
このような問題から不安定になる機体を適切に制御するためには、フライバイワイヤの導入は不可欠なものであった。しかし、これも、静安定性緩和の要請から、というよりは、不安定さを力業で安定化させるための要請、と言う方が適切であろう。フライトシミュレータを用いた並行開発、というのは、1970年代以降(アポロ計画以降、と言うべきだろうか)の航空機開発における(現在に至るまでの)トレンドであり、これ自体はいい方向にはたらいたと思われる。
……という具合に、ティルト・ローター機の開発は、決して技術的にクリアなものではなく、最適なかたちを模索しつつ、ある部分は妥協で、またある部分は力業で克服することですすめられてきたわけだ。そして、XV-15 という試験機があるひとつのはっきりしたかたちとして完成したことは、実はいいことばかりではなかったのかもしれない。
1980年、カーター政権下で決行されたイーグルクロー作戦(テヘラン駐アメリカ大使館人質救出作戦)において、ヘリコプターの運用トラブルから人質救出に失敗、更には撤収時にヘリと輸送機が衝突、8名の死者と4名の負傷者を出すという散々な結果に終わったことをきっかけとして、翌1981年、アメリカ国防総省は、陸・海・空軍ならびに海兵隊が共用する新しい垂直離着陸機の開発計画である JVX(Joint-service Vertical take-off/landing eXperimental, 統合垂直離着陸研究)プロジェクトを立ち上げた。これは当初は陸軍が主導的立場にあったが、やがて海軍と海兵隊に主導者が代わり、1982年12月に提案依頼書が発行された。
JVX に要求されたのは、垂直離着陸能力と十分なスピード、そして兵員の輸送力だった。数社がこれに関心を示したが、実際に提出された開発案は、XV-15 プロジェクトに関わったベル社とボーイング・バートル社が共同で提出した、XV-15 を原型とする案のみであった。1983年4月26日、ベル = ボーイング案が採用され、1985年1月15日、JVX には "V-22 Osprey" の名称が与えられ、まず試作機を6機製作することが決められた。
V-22 の開発は決して順調というわけではなかった。計画の遅れと予算の拡大のために、陸軍がプロジェクトから離脱し、アメリカ上院は予算案を否決した。ブッシュ政権の国防長官であったディック・チェイニーは予算削減のため開発を中止する発表までしたのだが、共和党政権下で、このプロジェクトは生き残った。そして、民主党のクリントン政権下においても前向きの評価を得、潤沢な予算が付けられて継続していった。
最初の6機の試作機は、計画の主導的立場にある海兵隊に納入されることになり、海兵隊の機体であることを示す M を付与した MV-22 という名称になった。本来の命名規則通りならば、CH-46 のように、まず輸送用途を示す C、次いで垂直離着陸機を示す V を表示して CV-22 という名称になるところなのだが、もともと海軍や海兵隊では CV というと航空母艦を示す。そのため、混乱を避けるためにこのような名称になっている。空軍ではその問題が生じないため、命名規則通りに CV-22 という名称となった。MV-22 は 1989年3月19日にヘリコプターモードで初飛行し、同年9月14日には水平飛行モードでの初飛行に成功した。1990年末には、航空母艦上での運用試験にも成功した。しかし、翌1991年から、オスプレイの「未亡人製造機」としての歴史がはじまるのである。以下、時間の経過に沿って、V-22 が起こした事故に関して書いていくことにする。
最初の事故が発生したのは 1991年6月11日だった。これは映像が残されている:
この映像をご覧になって、何かデジャヴのようなものを感じられないだろうか。YF-16 や F-22 のフライバイワイヤシステムに起因する事故に、よく似た映像である。実際、この事故の原因は、機体の左右の傾き(ロール)を検出するジャイロの配線を逆にしていたのが原因とされている。
ただし、ひとつだけ気にかかることがある。先にも書いたけれど、V-22 のローターは、ヘリコプターのローターとしては最適ではない。左右のローターが、このような姿勢の崩れを容易に補正し得る高い揚力を生み出していないとしたら、このような機動に対する安定性が本質的に低い、ということが考えられる。それをフライバイワイヤで吸収しているのが、システムの不備によって露わになったのではないか……と、とれないこともない。
この事故では、乗員2名は無事であった。しかし、翌1992年7月20日の事故では、乗員7名(海兵隊員3名、民間人4名)全員が死亡という悲劇になってしまった。この事故は、着陸直前に片方のエンジンから発火、コントロールを失った機体が川に落ちた、というものである。
発火の原因は、水平飛行時にエンジンナセル内で潤滑油が漏れ、内部下方に溜っていたためである。着陸時にエンジンが立った結果、この油が高温のエンジン本体に触れて発火したのである。あれー、片方エンジンがダメになってもシャフトで連結されてるんだから大丈夫なんじゃないの……と思われた方もおられるだろうが、シャフトは軽量化のために複合素材で作られており、火災の熱のために軟化→破壊してしまった……というのが、事故調査の結論だった。この事故のために、全ての V-22 が、対策が施されるまでの11か月間飛行を停止された。
翌1993年、V-22 の安全性が確保された、という宣言がなされ、生産型の開発のゴーサインが出た。ベル社とボーイング社は、生産性の改善を主な目的とする改修を行い、これを V-22B として、まず4機の試作を行った。V-22B の1機目(第7号機)は1997年2月5日に初飛行した。同年4月、初期生産としてまず5機、2000年までに25機の生産が決定され、生産型の初号機は1999年4月に初飛行し、艦上運用試験が行われた。空軍仕様の機体も、V-22B 量産試作機を改修して製作され、試験が始まった。
そんな時である。2000年4月8日、3度目の事故が起きた。アリゾナ州マラナ飛行場で、夜間救出の訓練を行っていた際、垂直機動で下降中の MV-22 が墜落し、乗員4名、兵員15名(いずれも海兵隊員)全員が死亡したのである。V-22 の widow maker(未亡人製造機)という悪名を定着させてしまった、V-22 における現時点までの最悪の事故である。
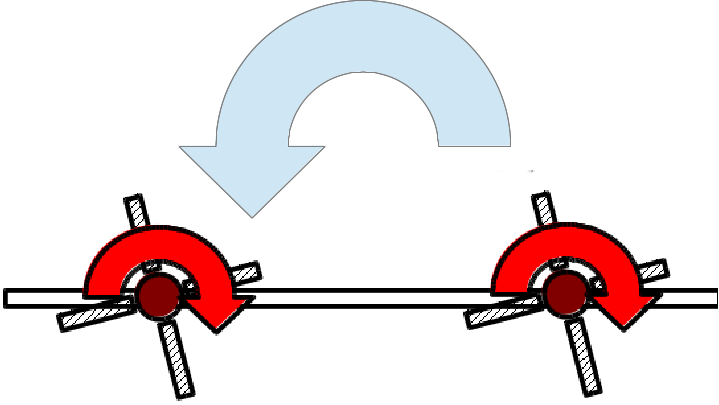
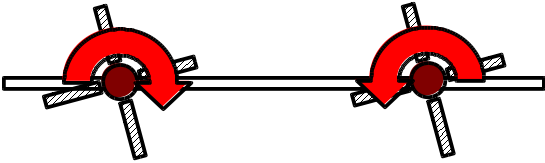
これは V-22 だけでなく、ヘリコプター一般に言えることなのだが、限度を超えた速度で降下を行うと、ローターの回転軸を中心としたトーラス(ドーナツ形)の渦が発生する。以下にシングルローターヘリコプターの場合の図を示す:

この渦が発生した状態を VRS(vortex ring state) というのだが、この状態に陥ると、ローターが十分な揚力を発生せず、機体は降下から抜け出せなくなる。固定翼の飛行機やグライダーにおける失速に相当する、非常に危険な状態である。
V-22 の対気速度 30 kt 以下の状態での規定降下速度は毎分 800 ft (244 m)である。事故機はこれに対して毎分約 2000 ft (610 m) で降下していた。目前で急減速した僚機を回避するためだったと言われているが、ヘリコプターのパイロットが絶対にしてはいけない機動をしてしまったわけだ。
それでは、これに対してどのような安全措置がなされたか、というと……規定降下速度を超えた際に、警告灯と、"Sink rate." と注意を喚起する音声警報装置が加えられた。それだけである。V-22 のローターは先に書いたようにヘリコプターとしての最適な形状ではない。ヘリとして十分な揚力を得るには大きさが不十分なのである。回避行動として上昇でなく下降、それも急激な下降を操縦者が選択したこと、そして VRS が発生したことと、この V-22 の本質的な問題との間には関連がある可能性が高いのだが、マニュアルに従った運用をしていれば、危険領域に踏み込まない、ということで、このような措置とされたのだろう。
4度目の事故は同2000年12月11日に起きた。ノースカロライナ州ジャクソンヴィル近郊で演習中の、海兵隊所属の MV-22 が墜落、乗員4名が死亡した。この事故の原因は概ね以下のようなものだった。
油圧系統のパイプが、振動のために隣接する電気系統の配線と擦れ合って破損、右ローターのローター角を司るメインの油圧系統の圧力が低下した。システムは警報を発したのだが、この事態の発生前に、何も原因がないのに警報が鳴った(警報システムのバグだと言われている)ために、乗務員は今回も同様のエラーと判断し、警報システムに対して8回もリセットをかけていた。その間に機体はコントロールを失い、1600 ft. 降下して森に激突したのである。
これに対して配線と油圧系統の一部変更、そして警報システムの改修が行われたが、再びオスプレイの飛行許可が出たのは2002年5月のことであった。
ここからしばらくは、死亡事故は発生していない。しかし、死亡事故に至らない程度の事故は何度も起きている。
2006年初頭、着陸操作中の V-22 のエンジン回転数が急激に上昇する事故が起きた。エンジンのパワーとローターのピッチ(迎え角)を抑えている状況で、乗員がスロットルレバーを下げる操作をしていたにも関わらず、この回転数上昇のために機体は 30 ft も浮き上がり、地面にたたきつけられた。この事故によって破損した片翼の修理費等は総計約 700万ドルであった。
事故の原因は2系統ある FADEC(Full Authority Digital Engine Control, エンジンのデジタル制御機構)のひとつの接続コネクタの配線ミスであった。対策として、FADEC のソフトウェアに今回のような事態を引き起こさないよう制限が加えられた。
同2006年7月11日、RIAT-インターナショナルエアタトゥー(世界でも最大規模の軍用航空機のショーで、イギリス・グロスターシャーのフェアフォード空軍基地で毎年7月開催される)とファーンボロ航空ショー(ロンドン郊外のファーンボロ航空基地で、西暦の末尾が偶数年の7月に開催される)に出席するために大西洋横断飛行中だった V-22 が、右エンジンのコンプレッサーストール(いわゆるエンスト)を起こし、整備のためにアイスランドに着陸した。一週間後、米海軍は、他の V-22 でもコンプレッサーの急激な回転数増加やストールが発生していることが判明したために調査を開始するとアナウンスした。
V-22 の制御用コンピュータチップが誤作動することによって操縦不能になる可能性があることが判明したため、2007年2月10日、米空軍と米海兵隊は一時的に全ての V-22 の飛行を差し止めた。
2007年3月29日、離陸前の V-22 のエンジンナセルが油圧系からのオイル漏れのために発火、火災が発生した。このとき、2006年に海兵隊の MV-22 がニューリバーでより深刻なエンジンナセルの火災を起こしていたことが報告された。
2007年11月6日、海兵隊のティルトローター機訓練部隊 VMMT-204 所属の MV-22 が訓練飛行中に火災発生、ノースカロライナ州のレユーヌ基地へ緊急着陸した。エンジンナセルから発火したこの火災で機体は深刻なダメージを負ったが、怪我人はいなかった。調査の結果、エンジン吸気口の塵芥除去装置の設計に欠陥があり、飛行中に吸気を阻害した結果、油圧系統に強いショックが加わり、このショックで油漏れが生じ、火災の原因になったと推測された。漏れた油が排気系の赤外線抑制装置(排気温度を下げ、赤外線追尾のミサイル等を防ぐ装置)に入ったことが発火の原因である。この事故により、初期型 (V-22A) の V-22 全機が改善のためのキットを装着するまで飛行を制限された(V-22B は既に該当部分の設計変更がなされていた)。
2009年度、空軍型の CV-22 が100万ドル以上の損失をもたらしたと発表された。
2010年4月8日、空軍所属の CV-22B がアフガニスタン南部で墜落、乗員3名と民間人1名が死亡、16名が負傷した。敵の攻撃によって撃墜された可能性も考えられたが、当初ははっきりしなかった。この CV-22B は多数の人員を載せていたためにホバリンクが可能な限界積載量に達しており、夜間、灯火管制下でカラート近郊(標高約 5000 ft. の峡谷)に着陸するときに、地形に起因すると思われる乱気流に遭遇したのである。米空軍の調査において、灯火管制、敵の攻撃、そして VRS は原因から除外され、事故に関わった重大な要素がいくつか挙げられた……低視界、着陸の際の不手際、状況認識の欠如、そして降下速度が大きかったことである。
ドナルド・ハーヴェル准将は、墜落するまでの最後の17秒間に、エンジントラブルの発生を示す「未確認の飛行機雲」を指摘したが、実際の墜落の原因に関しては、米軍機が墜落機の残骸とブラックボックスレコーダーを破壊した(V-22 に関する機密保持のためと思われる)ために、未だ明らかになっていない。
2012年4月11日、米海兵隊の強襲揚陸艦イオー・ジマ (LHD-7) の VMM-261(第261ティルトローター部隊)に所属する MV-22 が、合同演習「アフリカン・ライオン」に参加中、モロッコのタンタン・アガディール近郊で墜落した。海兵隊員2名が死亡、2名が重症を負い、機体は失われた。軍の調査では機体の機械的欠陥は発見できず、人為的ミスが事故原因とされた。
同2012年6月13日、米空軍の CV-22 が、フロリダのエグリン空軍基地で訓練中に墜落し、乗員5名が負傷した(うち二名は事故後すぐに退院)。この機体は逆さまに落下しており、主な損傷はこのために受けたものである。事故原因に関しては現在調査中である。
……はぁ。長かった。事故とはっきり認知されているものを全て挙げておいた。次回はこれらをまとめて、改めて V-22 の抱える問題に関して指摘することとする。